倍福 CX5130 嵌入式控製器�、CP6907 控製麵板及 TwinCAT 3 自動化軟件助力蘇州羅伯特木牛流馬物流技術有限公司(以下簡稱木牛流馬)提升產品性能�,進一步滿足工業 4.0 的要求。
蘇su州zhou木mu牛niu流liu馬ma是shi一yi家jia以yi工gong業ye車che輛liang激ji光guang導dao航hang控kong製zhi及ji算suan法fa為wei核he心xin技ji術shu�,開kai展zhan全quan係xi列lie工gong業ye車che輛liang無wu人ren駕jia駛shi設she計ji解jie決jue方fang案an及ji物wu料liao搬ban運yun移yi動dong機ji器qi人ren係xi列lie產chan品pin研yan發fa及ji產chan業ye化hua的de科ke技ji型xing企qi業ye。
suizhexiandaihuagongyedexunsufazhan����,duiwuliuxitongderouxinghuahezhinenghuayaoqiuyeyuelaiyuegao。wurenjiashiyunshuxitongzaizheyilingyufahuizhejiqizhongyaodezuoyong����,muniuliumazhenduizhezhongxuqiu����,jinxingledaliangdeyanfagongzuo�����,tuichuleduokuanjiguangdaohangchacheshi AGV���,以滿足食品飲料�、汽車製造和電子製造等行業對自動化倉儲物流搬運的需求。公司還通過其擁有自主知識產權的先進技術及硬件設備為 AGV 廠商或集成商提供核心技術解決方案。
激光導航 AGV:靈活����、經濟的物流搬運工具
先進的 AGV 係(xi)統(tong)在(zai)倉(cang)儲(chu)物(wu)流(liu)應(ying)用(yong)中(zhong)遇(yu)到(dao)的(de)核(he)心(xin)挑(tiao)戰(zhan)是(shi)需(xu)要(yao)穿(chuan)過(guo)各(ge)個(ge)貨(huo)架(jia)�����,靈(ling)活(huo)高(gao)效(xiao)地(di)進(jin)行(xing)導(dao)航(hang)。解(jie)決(jue)方(fang)案(an)是(shi)使(shi)用(yong)基(ji)於(yu)激(ji)光(guang)技(ji)術(shu)的(de)計(ji)算(suan)機(ji)輔(fu)助(zhu)車(che)輛(liang)控(kong)製(zhi)��,因(yin)為(wei)它(ta)不(bu)依(yi)賴(lai)於(yu)嵌(qian)入(ru)在(zai)地(di)板(ban)上(shang)的(de)固(gu)定(ding)裝(zhuang)置(zhi)���,它(ta)不(bu)僅(jin)允(yun)許(xu)車(che)輛(liang)在(zai)倉(cang)儲(chu)空(kong)間(jian)內(nei)自(zi)由(you)導(dao)航(hang)�����,而(er)且(qie)還(hai)具(ju)有(you)成(cheng)本(ben)優(you)勢(shi)。木(mu)流(liu)牛(niu)馬(ma)的(de)激(ji)光(guang)導(dao)航(hang) AGV 可(ke)以(yi)實(shi)現(xian)在(zai)貨(huo)架(jia)上(shang)自(zi)動(dong)取(qu)放(fang)貨(huo)物(wu)。激(ji)光(guang)導(dao)航(hang)係(xi)統(tong)既(ji)可(ke)以(yi)單(dan)車(che)獨(du)立(li)工(gong)作(zuo)�,也(ye)可(ke)以(yi)在(zai)多(duo)車(che)交(jiao)通(tong)管(guan)理(li)係(xi)統(tong)的(de)調(tiao)度(du)下(xia)實(shi)現(xian)多(duo)車(che)協(xie)同(tong)工(gong)作(zuo)。為(wei)了(le)應(ying)對(dui)這(zhe)類(lei)導(dao)航(hang)所(suo)麵(mian)臨(lin)的(de)嚴(yan)峻(jun)技(ji)術(shu)挑(tiao)戰(zhan)���,木(mu)牛(niu)流(liu)馬(ma)的(de)係(xi)統(tong)全(quan)麵(mian)采(cai)用(yong)了(le)倍(bei)福(fu)的(de)控(kong)製(zhi)組(zu)件(jian)。激(ji)光(guang)導(dao)航(hang) AGV 中使用的是一台搭載 Intel Atom® 雙核處理器且安裝了 TwinCAT 3 軟件的 CX5130嵌入式控製器��,和用於實現可視化和人機交互的 CP6907 控製麵板(帶 5.7 英寸觸摸屏)。控製麵板使用的是 TwinCAT 3 PLC HMI 界麵��,可以非常方便的進行 AGV 小車參數配置和站點定位調試。為了達到激光導航所需的速度和精度����,係統還使用了 XFC 超采樣端子模塊。倍福還提供了一個 TwinSAFE 解決方案����,將安全功能無縫集成到整個係統中。

強大的控製平台:嵌入式控製器
結構緊湊的 CX5130 嵌入式控製器用於實現激光導航 AGV 所需的所有控製功能�����,省掉了客戶之前用的導航控製器和通信模塊�,節省了空間和成本。CX5130 嵌入式控製器中實現的軟件功能包括:用 C++ 編寫的 AGV 小車行走和轉向軸的激光導航算法和閉環控製����,AGV 單車控製邏輯程序�����,TwinCAT3 PLC HMI 可視化界麵和調度軟件����,以及用於自動充電站點的 TCP/IP 通信程序。
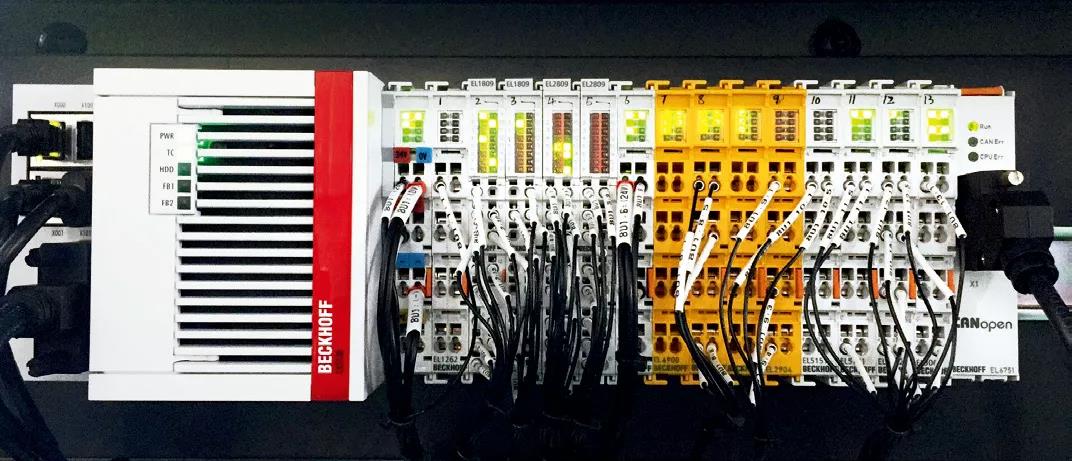
“之所以選擇 CX5130 嵌入式控製器���,主要是因為它功能強大����、接口豐富��、結構緊湊。它是一款適合安裝在 DIN 導dao軌gui上shang的de嵌qian入ru式shi控kong製zhi器qi�,跟gen我wo們men之zhi前qian使shi用yong的de控kong製zhi係xi統tong相xiang比bi��,它ta可ke為wei我wo們men節jie省sheng大da量liang的de空kong間jian。另ling一yi個ge優you點dian是shi�,倍bei福fu的de總zong線xian端duan子zi模mo塊kuai係xi統tong支zhi持chi各ge種zhong現xian場chang總zong線xian����,例li如ru CANopen 和 PROFIBUS��,因(yin)此(ci)能(neng)夠(gou)確(que)保(bao)它(ta)與(yu)不(bu)同(tong)外(wai)圍(wei)設(she)備(bei)之(zhi)間(jian)有(you)良(liang)好(hao)的(de)兼(jian)容(rong)性(xing)。另(ling)外(wai)�����,嵌(qian)入(ru)式(shi)控(kong)製(zhi)器(qi)具(ju)有(you)以(yi)太(tai)網(wang)端(duan)口(kou)�,支(zhi)持(chi)多(duo)種(zhong)協(xie)議(yi)���,更(geng)加(jia)便(bian)於(yu)實(shi)現(xian)無(wu)線(xian)通(tong)信(xin)。”木牛流馬研發總監潘永平說道。
采用 XFC 實現高速��、高精度的激光導航
當 AGV 小xiao車che通tong過guo激ji光guang進jin行xing導dao航hang時shi����,其qi內nei置zhi的de激ji光guang掃sao描miao儀yi會hui一yi直zhi快kuai速su旋xuan轉zhuan�����,以yi掃sao描miao分fen布bu在zai工gong作zuo區qu域yu的de反fan射she標biao記ji。隻zhi有you掃sao描miao到dao數shu量liang足zu夠gou多duo的de反fan射she標biao記ji條tiao����,才cai能neng計ji算suan出chu精jing確que的de AGV 小車位置。高速高精度的掃描在這裏至關重要。為了實現這一點�,木牛流馬選用了倍福的 XFC EtherCAT 超采樣模塊 EL1262。它能夠在 1 ms 時間內執行 1000 次采樣操作(相當於 1 μs 的采樣周期)����,支持超高分辨率的目標值和實際值采集�,滿足激光導航的高速要求。
通用軟件平台助力實現更高的性能
TwinCAT 3 控製軟件是高性能硬件設備的完美補充。功能強大的 TwinCAT 3 支持 C++ 編程和模塊調用�����,這對於木流牛馬來說是一項非常重要的優勢���,它還縮短了導航控製算法平台遷移的開發周期。TwinCAT 3 采(cai)用(yong)模(mo)塊(kuai)化(hua)結(jie)構(gou)��,具(ju)有(you)很(hen)高(gao)的(de)靈(ling)活(huo)性(xing)��,為(wei)木(mu)牛(niu)流(liu)馬(ma)的(de)工(gong)程(cheng)師(shi)創(chuang)建(jian)軟(ruan)件(jian)提(ti)供(gong)了(le)一(yi)個(ge)高(gao)效(xiao)的(de)開(kai)發(fa)環(huan)境(jing)��,便(bian)於(yu)工(gong)程(cheng)師(shi)協(xie)同(tong)工(gong)作(zuo)�,提(ti)高(gao)程(cheng)序(xu)開(kai)發(fa)效(xiao)率(lv)。“對我們來說�����,能夠使用 C/C++ 作為編程語言是很重要的�����,因為我們對於這一編程語言擁有多年的專業經驗�,能夠實施複雜的功能塊。如果允許我們用 C++ 編程工藝����,我們就能夠快速��、輕鬆地將這些功能塊嵌入到 TwinCAT 3 中��,就像用 C++ 編寫的激光導航算法一樣。另外�,TwinCAT 3 還可以方便地將程序任務指定到某個 CPU 內核上運行。這樣可以利用多核 CPU(如 CX5130)的處理能力�,提高程序運行效率。”木牛流馬工程部總監餘誌飛解釋道。

集成式安全解決方案節省時間和成本
由於激光導航 AGV 小車的工作區域大都是在有貨架的倉庫中�����,不可避免地會有工作人員出入。因此 AGV 小車的安全防撞功能至關重要。為了達到相應的安全防護等級��,木牛流馬采用了全麵的 TwinSAFE 安全解決方案。該解決方案由 EL6900 TwinSAFE PLC���、一個 EL1904 TwinSAFE 數字量輸入端子模塊和一個 EL2904 TwinSAFE 數字量輸出端子模塊組成。AGV 車身四周都裝有安全傳感器����,通過 EL1904 輸入端子模塊進行掃描。當 AGV 小車在安全區域移動時傳感器檢測到有障礙物��,TwinSAFE 係統會立即作出響應����,觸發 AGV 小車行走軸的緊急刹車製動����,然後在經過設置的延遲時間之後切斷驅動器的供電。“使用 TwinSAFE 將安全解決方案完全集成到控製係統中�,不需要獨立的安全係統和相關的布線工作��,減少了接線成本���,節省了項目開發時間。”木牛流馬安質量安全監督員王海霞說道。
共同打造經得起未來考驗的解決方案
自從 2016 年初木牛流馬公司在第一台激光導航叉車式 AGV 上使用倍福的產品開始����,雙方的合作越來越深入和廣泛�����,目前在開發的磁導式和智能貨架穿梭車等都采用了倍福的自動化解決方案。“倍福基於 PC 的自動化平台所具備的開放性和靈活性為木牛流馬在未來拓展應用範圍方麵提供了廣闊的空間。”木牛流馬總經理王平感歎道。他對未來有非常樂觀的展望:“基於 PC 的控製技術所具備的超強的處理能力也能夠滿足未來越來越高的控製係統要求。”
關於德國倍福
倍福(Beckhoff)公司總部位於德國威爾市。作為全球自動化技術的驅動者����,倍福定義了自動化領域的許多國際標準。公司所生產的工業 PC�����、現場總線模塊�����、驅動產品和TwinCAT自動化軟件構成了一套完整的����、相互兼容的控製係統�����,可為各個工控領域提供開放式自動化係統和完整的解決方案。倍福於1997年進入中國市場����,致力於幫助製造企業提升競爭優勢��,加速轉型升級。倍福在業內享有“創新引擎”的美譽�����,公司所倡導的PC控製技術具有良好的開放性��,將IT技術��、互聯網和自動化技術完美融合���,助力實現工業 4.0 和智能製造。憑借領先的技術優勢和豐富的行業知識����,倍福的創新產品和解決方案廣泛應用於風力發電����、半導體�����、光伏太陽能�、電子製造��、金屬加工�、包裝機械��、物流輸送以及樓宇自控等眾多領域。
更多信息���,請登陸 Beckhoff 中文官方網站:www.beckhoff.com.cn