德國卡爾斯魯厄理工學院(KIT)的電力係統和高壓技術研究所(IEH)正(zheng)在(zai)研(yan)究(jiu)如(ru)何(he)確(que)保(bao)因(yin)向(xiang)可(ke)再(zai)生(sheng)能(neng)源(yuan)過(guo)渡(du)而(er)發(fa)生(sheng)變(bian)化(hua)的(de)輸(shu)電(dian)網(wang)的(de)係(xi)統(tong)穩(wen)定(ding)性(xing)。除(chu)了(le)模(mo)擬(ni)研(yan)究(jiu)之(zhi)外(wai)���,發(fa)電(dian)廠(chang)和(he)基(ji)於(yu)逆(ni)變(bian)器(qi)的(de)發(fa)電(dian)係(xi)統(tong)的(de)行(xing)為(wei)正(zheng)在(zai)被(bei)用(yong)作(zuo)專(zhuan)用(yong)測(ce)試(shi)環(huan)境(jing)的(de)孤(gu)島(dao)電(dian)網(wang)中(zhong)進(jin)行(xing)仿(fang)真(zhen)。在(zai)這(zhe)裏(li)��,研(yan)究(jiu)人(ren)員(yuan)正(zheng)在(zai)運(yun)行(xing)安(an)裝(zhuang)有(you) TwinCAT 的倍福嵌入式控製器上實施具有創新意義的新型控製方法�����,以驗證它們在真實場景中的應用是否可行。
麵向未來電網的
電網友好型控製方法
在zai很hen多duo輸shu電dian網wang中zhong��,可ke再zai生sheng能neng源yuan發fa電dian比bi例li正zheng在zai逐zhu步bu增zeng加jia。與yu傳chuan統tong的de基ji於yu同tong步bu發fa電dian機ji的de發fa電dian設she備bei不bu同tong���,風feng力li和he光guang伏fu發fa電dian設she備bei通tong過guo並bing網wang逆ni變bian器qi直zhi接jie將jiang電dian能neng輸shu入ru公gong共gong電dian網wang���;但dan在zai使shi用yong傳chuan統tong的de電dian網wang跟gen隨sui逆ni變bian器qi控kong製zhi時shi����,基ji於yu逆ni變bian器qi運yun行xing的de資zi源yuan在zai超chao過guo一yi定ding比bi例li時shi會hui出chu現xian穩wen定ding性xing問wen題ti。這zhe就jiu是shi為wei什shen麼me需xu要yao創chuang新xin的de控kong製zhi方fang法fa����,以yi使shi可ke再zai生sheng能neng源yuan發fa電dian係xi統tong的de整zheng合he不bu必bi因yin此ci而er受shou到dao限xian製zhi。眾zhong所suo周zhou知zhi�,這zhe些xie組zu網wang控kong製zhi方fang法fa旨zhi在zai為wei逆ni變bian器qi提ti供gong電dian網wang支zhi撐cheng的de行xing為wei — 100 多年來一直與基於同步發電機的發電設備類型相關。其結果包括讓風力發電機也具有瞬時儲能能力。

通過 TwinCAT HMI 對電網仿真進行操作和監測
電網仿真
人們無法對歐洲大陸互聯電網中強烈變化電網頻率下的逆變器行為進行研究。IEH 為(wei)此(ci)建(jian)立(li)了(le)一(yi)個(ge)電(dian)網(wang)仿(fang)真(zhen)係(xi)統(tong)���,用(yong)於(yu)仿(fang)真(zhen)大(da)型(xing)發(fa)電(dian)設(she)備(bei)的(de)真(zhen)實(shi)行(xing)為(wei)�����,因(yin)此(ci)也(ye)可(ke)用(yong)於(yu)仿(fang)真(zhen)大(da)型(xing)輸(shu)電(dian)網(wang)行(xing)為(wei)。電(dian)網(wang)仿(fang)真(zhen)係(xi)統(tong)包(bao)括(kuo)一(yi)個(ge)帶(dai)勵(li)磁(ci)機(ji)的(de)同(tong)步(bu)發(fa)電(dian)機(ji)����,通(tong)過(guo)一(yi)個(ge)由(you)驅(qu)動(dong)逆(ni)變(bian)器(qi)和(he)異(yi)步(bu)電(dian)機(ji)(而不是渦輪機)zuchengdebiansuqudongxitongqudong。zhoushanghaiyouyigefeilun�,yidadaoyufadianshebeizhongdewolunjixiangdangdeguanliang。lianjiefuhekenenghuidaozhipinlvzhoujiang�,daxingshudianwangzaishoudaoganraoshihuichuxianzhezhongqingkuang。tongguoshijitigongshunshichubei�,dianwangfangzhen(與電力電子電網仿真相反)允許在孤島電網中連接的資源對電網頻率作出瞬時響應。
倍福的 CX5140 嵌入式控製器用作中央自動化和控製硬件����,而各種 EtherCAT 端子模塊則用於測量機械和電氣變量。兩台設備上都安裝了編碼器來測量旋轉速度����,這些編碼器通過 EL5021 SinCos 編碼器接口端子模塊進行評估。扭矩可以通過兩個扭矩測量軸和一個 ELM300x 模擬量電壓測量端子模塊確定。EL3783 電力監測超采樣端子模塊與電流互感器相結合��,采集三相電壓�����、電流和功率值。CX5140 嵌入式控製器通過 EtherCAT 與驅動逆變器通信。同步發電機勵磁機的勵磁由一個 EL2535-0005 脈寬電流端子模塊保障。電源接觸器由 EL2634 繼電器端子模塊作為執行器控製。
閉環控製的設計在 MATLAB®/Simulink® 中通過使用基於模型的設計完成����,編譯後�����,使用 TwinCAT 3 Target for Simulink® 在嵌入式控製器上實時執行。通過 TwinCAT HMI 實施了一個方便的用戶界麵來操作試驗台�,在這裏����,可以在運行期間實時修改控製參數�����、設定值和極限值。此外�,可以用圖形方式顯示測量結果和設備狀態。TwinCAT Scope View 可用於可視化和記錄測量值。
逆變器仿真
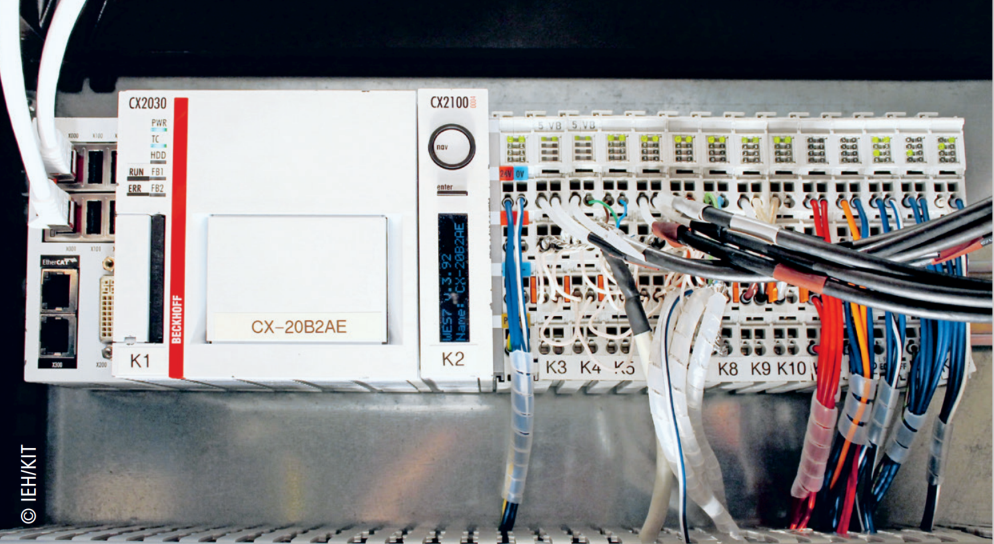
對於逆變器仿真���,CX2030 嵌入式控製器可以實現 50 μs 的短控製周期
針(zhen)對(dui)基(ji)於(yu)逆(ni)變(bian)器(qi)的(de)發(fa)電(dian)設(she)備(bei)新(xin)設(she)計(ji)的(de)控(kong)製(zhi)方(fang)法(fa)的(de)研(yan)究(jiu)需(xu)要(yao)一(yi)個(ge)靈(ling)活(huo)的(de)測(ce)試(shi)設(she)施(shi)���,它(ta)在(zai)如(ru)何(he)實(shi)施(shi)控(kong)製(zhi)方(fang)法(fa)方(fang)麵(mian)必(bi)須(xu)具(ju)有(you)足(zu)夠(gou)的(de)自(zi)由(you)度(du)。由(you)於(yu)第(di)一(yi)步(bu)的(de)重(zhong)點(dian)是(shi)對(dui)逆(ni)變(bian)器(qi)電(dian)網(wang)側(ce)進(jin)行(xing)控(kong)製(zhi)�����,因(yin)此(ci)三(san)相(xiang)逆(ni)變(bian)器(qi)的(de)調(tiao)製(zhi)和(he)功(gong)率(lv)半(ban)導(dao)體(ti)的(de)行(xing)為(wei)可(ke)以(yi)通(tong)過(guo)三(san)個(ge)線(xian)性(xing)電(dian)壓(ya)放(fang)大(da)器(qi)仿(fang)真(zhen)。在(zai)這(zhe)裏(li)���,電(dian)壓(ya)放(fang)大(da)器(qi)被(bei)用(yong)作(zuo)受(shou)控(kong)的(de)理(li)想(xiang)電(dian)壓(ya)源(yuan)。逆(ni)變(bian)器(qi)仿(fang)真(zhen)控(kong)製(zhi)櫃(gui)位(wei)於(yu)電(dian)壓(ya)放(fang)大(da)器(qi)和(he)電(dian)網(wang)仿(fang)真(zhen)的(de)孤(gu)島(dao)電(dian)網(wang)之(zhi)間(jian)。除(chu)了(le)控(kong)製(zhi)硬(ying)件(jian)之(zhi)外(wai)����,控(kong)製(zhi)櫃(gui)中(zhong)還(hai)安(an)裝(zhuang)了(le)可(ke)調(tiao)節(jie)的(de)主(zhu)電(dian)源(yuan)濾(lv)波(bo)器(qi)�、電壓和電流測量裝置�,以及接觸器和斷路器等設備。
一台插接有多個 EtherCAT 端子模塊的嵌入式控製器也被用作該試驗台的中央平台。一台 CX2030 甚至能夠以快速循環時間執行複雜的程序。6 個 EL3702 雙通道模擬量輸入端子模塊通過霍爾效應電流傳感器采集多個測量點上的三相電壓和電流值。電壓設定值通過 EL4732 模擬量輸出端子輸出���,並作為電壓電平傳輸給電壓放大器。
與電網仿真中一樣�,在 MATLAB®/Simulink® 中開發和驗證的控製方法也可以在 CX2030 上實時執行。主要的不同點在於控製周期短��,僅為 50 μs。加上 EtherCAT 端子模塊和電壓放大器�����,整個控製回路的死區時間僅為 150 μs。試驗台也可通過由 TwinCAT HMI 創建的用戶界麵進行操作和監測。此時最重要的是對極限值的快速監測��,如果超過了限值�����,就會導致安全關斷。
測試環境
逆變器仿真與電網仿真相結合��,可以構成一個孤島測試環境�����,可以輕鬆對新的組網控製方法的行為進行研究。研究所已經對“同步逆變器”控(kong)製(zhi)方(fang)法(fa)�����,即(ji)利(li)用(yong)逆(ni)變(bian)器(qi)仿(fang)真(zhen)同(tong)步(bu)發(fa)電(dian)機(ji)的(de)行(xing)為(wei)����,進(jin)行(xing)了(le)研(yan)究(jiu)並(bing)公(gong)布(bu)了(le)研(yan)究(jiu)結(jie)果(guo)。實(shi)驗(yan)表(biao)明(ming)�����,配(pei)備(bei)合(he)適(shi)控(kong)製(zhi)係(xi)統(tong)的(de)逆(ni)變(bian)器(qi)式(shi)發(fa)電(dian)係(xi)統(tong)可(ke)以(yi)提(ti)供(gong)瞬(shun)時(shi)電(dian)能(neng)儲(chu)備(bei)���,為(wei)電(dian)網(wang)提(ti)供(gong)技(ji)術(shu)支(zhi)撐(cheng)。這(zhe)也(ye)可(ke)以(yi)證(zheng)明(ming)���,與(yu)實(shi)時(shi)模(mo)擬(ni)器(qi)相(xiang)比(bi)���,可(ke)以(yi)使(shi)用(yong)已(yi)在(zai)工(gong)業(ye)環(huan)境(jing)中(zhong)得(de)到(dao)成(cheng)熟(shu)應(ying)用(yong)的(de)控(kong)製(zhi)平(ping)台(tai)實(shi)現(xian)組(zu)網(wang)控(kong)製(zhi)。
展(zhan)望(wang)未(wei)來(lai)�,研(yan)究(jiu)所(suo)將(jiang)繼(ji)續(xu)開(kai)發(fa)組(zu)網(wang)控(kong)製(zhi)方(fang)法(fa)���,以(yi)將(jiang)其(qi)用(yong)於(yu)基(ji)於(yu)逆(ni)變(bian)器(qi)的(de)操(cao)作(zuo)設(she)備(bei)中(zhong)���,如(ru)風(feng)力(li)發(fa)電(dian)機(ji)。由(you)於(yu)基(ji)於(yu)逆(ni)變(bian)器(qi)仿(fang)真(zhen)的(de)研(yan)究(jiu)取(qu)得(de)了(le)成(cheng)功(gong)��,一(yi)個(ge)代(dai)表(biao)風(feng)力(li)發(fa)電(dian)機(ji)驅(qu)動(dong)係(xi)統(tong)的(de)試(shi)驗(yan)台(tai)正(zheng)在(zai)建(jian)立(li)中(zhong)��,該(gai)試(shi)驗(yan)台(tai)由(you)一(yi)個(ge)發(fa)電(dian)機(ji)和(he)縮(suo)減(jian)性(xing)能(neng)的(de)全(quan)逆(ni)變(bian)器(qi)組(zu)成(cheng)。這(zhe)裏(li)的(de)重(zhong)點(dian)將(jiang)放(fang)在(zai)風(feng)力(li)發(fa)電(dian)機(ji)中(zhong)所(suo)使(shi)用(yong)的(de)部(bu)件(jian)的(de)應(ying)用(yong)�,如(ru)控(kong)製(zhi)硬(ying)件(jian)和(he)功(gong)率(lv)半(ban)導(dao)體(ti)���,將(jiang)繼(ji)續(xu)研(yan)究(jiu)如(ru)何(he)能(neng)夠(gou)在(zai)風(feng)力(li)發(fa)電(dian)機(ji)中(zhong)實(shi)施(shi)組(zu)網(wang)控(kong)製(zhi)係(xi)統(tong)。
關於德國倍福
倍福(Beckhoff)是一家專注於自動化新技術的德資企業��,創立於 1980 年(nian)�����,總(zong)部(bu)位(wei)於(yu)德(de)國(guo)威(wei)爾(er)市(shi)。作(zuo)為(wei)全(quan)球(qiu)自(zi)動(dong)化(hua)技(ji)術(shu)的(de)驅(qu)動(dong)者(zhe)�,倍(bei)福(fu)定(ding)義(yi)了(le)自(zi)動(dong)化(hua)領(ling)域(yu)的(de)許(xu)多(duo)標(biao)準(zhun)���,是(shi)國(guo)際(ji)標(biao)準(zhun)的(de)製(zhi)定(ding)者(zhe)和(he)推(tui)動(dong)者(zhe)。公(gong)司(si)所(suo)生(sheng)產(chan)的(de)工(gong)業(ye) PC���、現場總線模塊�����、驅動產品和 TwinCAT 自動化軟件構成了一套完整的�����、相互兼容的控製係統�,可為各個工控領域提供開放式自動化係統和完整的解決方案。經過 40 年的發展和努力����,倍福已在世界各地設立 30 多家分支機構�����,加上全球的合作夥伴�����,業務遍及 70 多個國家和地區。
倍福於 1997 年進入中國市場�����,中國區總部落戶於上海市北高新產業園區�����,現有員工 300 人�����,辦事處遍及國內 30 座大中城市。創新產品和解決方案廣泛應用於風力發電�、半導體����、光伏太陽能��、電子製造���、金屬加工��、包裝機械�����、印刷機械��、塑料加工��、輪胎加工��、木材加工���、玻璃機械����、物流輸送以及樓宇自動化等眾多領域。
公司傾力推廣的 EtherCAT 實時工業以太網於 2014 年成為中國國家推薦性標準�,並已入編工信部的《國家智能製造標準體係建設指南》。作為一家技術驅動型公司��,倍福一直注重在技術上尋求突破創新���,在業內享有“創新引擎”的美譽。倍福基於 PC 的控製技術具有良好的開放性��,它支持所有主流的工業通信協議��,將 IT 技術�����、互聯網和自動化技術完美融合在一起���,為實現工業 4.0 和智能製造奠定了堅實的技術基礎。
更多新聞請瀏覽: https://www.beckhoff.com.cn