PC 控製技術實現
傳統螺旋葉片成型過程的自動化
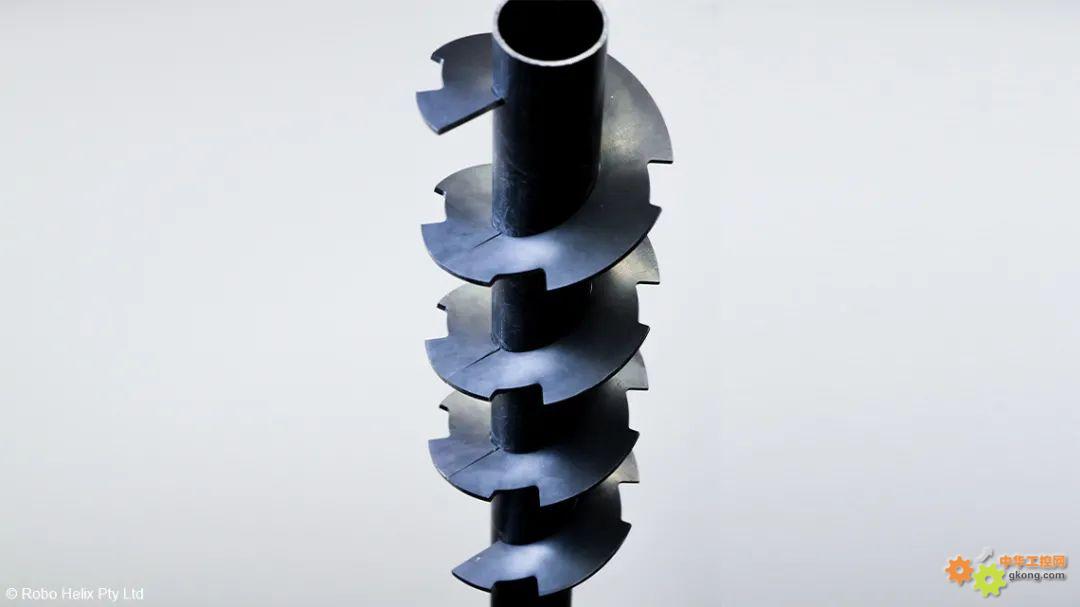
成立於 2015 年的 RoboHelix 公(gong)司(si)推(tui)出(chu)了(le)全(quan)球(qiu)首(shou)款(kuan)全(quan)自(zi)動(dong)機(ji)器(qi)人(ren)化(hua)葉(ye)片(pian)成(cheng)型(xing)機(ji)��,為(wei)螺(luo)旋(xuan)葉(ye)片(pian)成(cheng)型(xing)行(xing)業(ye)帶(dai)來(lai)了(le)革(ge)新(xin)。傳(chuan)統(tong)的(de)液(ye)壓(ya)葉(ye)片(pian)成(cheng)型(xing)機(ji)使(shi)用(yong)的(de)是(shi)與(yu)葉(ye)片(pian)物(wu)理(li)參(can)數(shu)相(xiang)對(dui)應(ying)的(de)模(mo)具(ju)。因(yin)此(ci)���,傳(chuan)統(tong)工(gong)藝(yi)需(xu)要(yao)用(yong)到(dao)許(xu)多(duo)這(zhe)種(zhong)昂(ang)貴(gui)而(er)笨(ben)重(zhong)的(de)模(mo)具(ju)����,而(er)且(qie)視(shi)模(mo)具(ju)的(de)大(da)小(xiao)不(bu)同(tong)����,模(mo)具(ju)製(zhi)作(zuo)和(he)設(she)置(zhi)時(shi)間(jian)往(wang)往(wang)需(xu)要(yao)半(ban)小(xiao)時(shi)到(dao)一(yi)小(xiao)時(shi)。RoboHelix 公司創始人兼 CEO Hayel Smair 評論說道:“這種製造工藝自工業革命以來就一直存在。”公司的目標是將批量加工時間從幾小時縮短到幾分鍾。公司擁有豐富的機器人技術背景��,Smair 解釋道:“我意識到螺旋葉片從扁平坯件變形時涉及到很多精確的運動���,於是我采用了一個機器人化的係統來仿真這些運動。”
經過評估���,我們選用了倍福的驅動產品實施新生產係統中的伺服軸。負責 RoboHelix 機器的電氣設計�����、集成和編程的工程師 Budhaditya Majumdar 博士說道:“市場上很少有企業能夠為我們提供集高精度���、強qiang大da性xing能neng以yi及ji低di成cheng本ben等deng優you點dian於yu一yi體ti的de伺si服fu電dian機ji。自zi從cong我wo們men與yu倍bei福fu展zhan開kai合he作zuo後hou�����,他ta們men現xian在zai不bu僅jin可ke為wei我wo們men提ti供gong運yun動dong控kong製zhi產chan品pin和he安an全quan相xiang關guan產chan品pin��,而er且qie還hai能neng提ti供gong HMI 產品!”

AX5000 伺服驅動器可以精確控製 AM8000 伺服電機
基於 PC 的控製技術
可以輕鬆適應不同的機器型號
RoboHelix 機器係列有多種型號�,PLC 程序的輕鬆移植是實現批量生產的關鍵。Budhaditya Majumdar 博士解釋道:“我們不希望在齒輪比或螺杆的機電設計發生改變時都要修改程序。TwinCAT 和基於 PC 的控製結構讓我們無需更改 PLC 代碼即可調整驅動器�、電機和機電參數。”
RoboHelix 機器使用的 CX5140 是一款搭載四核處理器的嵌入式控製器。程序運行基於根據螺旋線材料特性計算得出的表格。“我們以前使用的硬件計算表格需要花費 30 秒鍾的時間。CX5140 中有一個處理器核專門用於 PLC 程序�����,它在幾分之一秒內就能完成任務。另一個處理器核專門用於運動控製��,剩餘的處理器核由操作係統��、TwinCAT Runtime 和 TwinCAT HMI Server 共享。”Majumdar 博士解釋說道。

來自 RoboHelix 公司的業務拓展專員 Peter Fahim�、電氣和控製部門主管 Budhaditya Majumdar 博士及公司 CEO Hayel Smair 與倍福澳大利亞新南威爾士州辦事處銷售工程師殷博川(從左至右)
高動態驅動技術助力實現高速生產
RoboHelix 公司的第二代 RX250 機器需要 25,000 公斤的線性力。Hayel Smair 解釋道:“我們想要基於伺服產品設計一個高精度��、性能強大��、處理速度快且高效的解決方案。傳統的液壓係統方案比較散亂��,無法實現精確控製。”複雜精密的機器中集成了 8 根數控軸�����,倍福的單電纜技術不僅減少了驅動器和電機的布線工作����,而且還縮短了電氣裝配時間。Majumdar 博士補充道:“我們以前的機器中使用的是一台脈衝型運動控製器。每個電機驅動器都有 4 個差分對用於運動控製�����,4 個差分用於將編碼器反饋發送給 PLC���,為 8 個電機設置線路需要花費很長時間。但有了單電纜技術後�,隻需簡單點擊��,即可使用 AX5000 驅動器和 AM8000 伺服電機。”AS2023 步進電機與 EL7041 步進電機端子模塊一起用於低扭矩電機。
RoboHelix 機器需要高精度的同步運動控製。用戶生成的數據從一個基於雲的 HelixNinja ruanjianxiazaidaoshebeizhong。ranhoujinyibuchulizhexiexinxi���,shengchengsanweizuobiao�����,monicongpijianzhizuodaoyepiandequanbuguocheng。dianjigenjuzhexiezuobiaotongbuyunxing�,yizhizuoyepian。“在我們以前的機器上��,同步運動是以犧牲性能和靈活性為代價的。”Budhaditya Majumdar 說道�����,“有了 TwinCAT NC Camming(TF5050)中的電子凸輪盤功能����,就可以隨時隨地實現相對同步運動。一旦校準好電機和驅動器����,尺寸和公差就不再是問題。”
便捷的機器操作和集成式機器安全
用戶可能需要在設備的不同側麵操作機器。“機(ji)器(qi)的(de)設(she)計(ji)允(yun)許(xu)操(cao)作(zuo)人(ren)員(yuan)從(cong)機(ji)器(qi)的(de)左(zuo)側(ce)或(huo)右(you)側(ce)插(cha)入(ru)坯(pi)件(jian)並(bing)取(qu)出(chu)葉(ye)片(pian)。對(dui)於(yu)操(cao)作(zuo)人(ren)員(yuan)來(lai)說(shuo)���,根(gen)據(ju)所(suo)需(xu)的(de)葉(ye)片(pian)旋(xuan)轉(zhuan)方(fang)向(xiang)����,無(wu)論(lun)是(shi)順(shun)時(shi)針(zhen)還(hai)是(shi)逆(ni)時(shi)針(zhen)旋(xuan)轉(zhuan)�,在(zai)機(ji)器(qi)的(de)兩(liang)側(ce)切(qie)換(huan)操(cao)作(zuo)更(geng)加(jia)方(fang)便(bian)。”Hayel Smair 說道。“將 CP3916 多點觸控控製麵板安裝在旋轉臂上的好處是�����,操作人員能夠近距離地操控觸摸屏。”據 Budhaditya Majumdar 博士介紹�,雙側操縱也適用於帶急停按鈕��、直接安裝在屏幕底部的按鈕擴展件����,因此操作人員可以在任何時候都能夠安全操控。
RoboHelix RX250 可以比傳統的製造工藝更快�、更安全��、更有效地完成葉片成型
RoboHelix 機器的操作界麵基於倍福的 TwinCAT HMI 軟件。CX5140 嵌入式控製器還安裝了 TwinCAT HMI Server����,CP3916 與它相連接�,瀏覽器在 Kiosk 模式下運行。Majumdar 博士解釋道:“以前我們使用的 HMI 自身是一個需要編程的計算設備。如今�,使用純無源麵板可以減少很多工作量。此外��,需要時也可以通過手機或聯網 PC 的瀏覽器查看操作界麵。”
關於德國倍福
倍福(Beckhoff)公司總部位於德國威爾市。作為全球自動化技術的驅動者���,倍福定義了自動化領域的許多國際標準。公司所生產的工業 PC�、現場總線模塊�����、驅動產品和TwinCAT自動化軟件構成了一套完整的�、相互兼容的控製係統���,可為各個工控領域提供開放式自動化係統和完整的解決方案。倍福於1997年進入中國市場���,致力於幫助製造企業提升競爭優勢���,加速轉型升級。倍福在業內享有“創新引擎”的美譽����,公司所倡導的PC控製技術具有良好的開放性����,將IT技術�、互聯網和自動化技術完美融合�����,助力實現工業 4.0 和智能製造。憑借領先的技術優勢和豐富的行業知識�,倍福的創新產品和解決方案廣泛應用於風力發電�、半導體�、光伏太陽能���、電子製造���、金屬加工��、包裝機械��、物流輸送以及樓宇自控等眾多領域。
更多信息�����,請登錄 Beckhoff 中文官方網站:www.beckhoff.com.cn